私はアイシャ・エヴァンスです。
私は西アフリカのセネガル出身で、幼い頃からテクノロジー、科学、工学に夢中になりました。
3つのことが起こりました。
私はパリで勉強しており、7歳から同伴者のいない未成年者としてダカール、セネガル、パリの間を往復していました。
つまり、それは単なる旅行ではなく、実際には世界だけでなく世界へのポータルでもありました。
それはまさに、知識、さまざまな環境、そして適応への入り口に関するものでした。
次に起こったのは、セネガルの家にいるときはいつも、パリの友達と話したいと思っていたことです。
それで父は長距離電話料金にうんざりして、その電話、ダイヤル式電話に小さなロックをかけました。
私は「分かった、問題ない、ハッキングした」と言いました、そして彼は請求書を受け取り続けました。
お父さん、いつかこれを見ているなら、またごめんなさい。
そして明らかに、インターネットも登場しました。
実際に何が起こったのかというと、テクノロジーという観点から見ると、それがあなたの体験、世界を理解し、その一部になりたいという欲求を形作るものであると私は本当に考えていました。
そして、私にとっての共通点は、物理的交通手段と仮想交通手段であるということです。なぜなら、それが私にとっての回転電話そのものだったからです。なぜなら、それがイノベーションのフライホイールの中心にあるからです。
さあ、早送りしてください。
今日はここにいます。
私は、交通とテクノロジーを結びつけることに取り組んでいる運動や業界の一員です。
はぁ。
それは通勤だけの問題ではありません。
それは、人、物、サービスを最終的にどのように移動させるかという点で、すべてを変えることです。
その変革にはロボタクシーが関係します。
ああ、無人運転車。
また?
本当に?
ええ、ええ、ええ、前にも聞いたことがあります。
そしてところで、彼らは常に次の10年にやって来ます。
ところで、それに取り組んでいる企業のアルファベットのスープがありますが、誰が誰で何をしているのかさえ思い出せません。
うん?
ええOK。
まあ、これは個人の自動運転車の話ではありません。
失望させて申し訳ありません。
これは実際にはいくつかのことについてです。
まず第一に、個人で所有する車は無駄な広がりです。
そしてそれらは基本的に多くの汚染と都市部の交通の原因となっています。
次に、自動運転シャトルという概念がありますが、率直に言って、それらは多くの人向けに最適化されています。
具体的に地点 A から地点 B に連れて行くことはできません。
わかりました。
さて、何と言うか、今日のいわゆる個人用自動運転車が登場しました。
現実には、それらの車には依然としてハンドルを握る人間、つまりセーフティドライバーが必要です。
誤解しないでください。私もその 1 台を所有しており、それに乗っているときは安全ドライバーです。
そこで問題は、これをどうするかということになります。
そうですね、ロボタクシーはまず第一に、地点 A から地点 B まで具体的に連れて行ってくれると思います。
第二に、あなたが使用していないときは、他の誰かがそれらを使用していることになります。
そして彼らは今日テストを受けています。
私たちがそのビジョンをついに達成しようとしていると言うとき、実際にはそれを信じる理由があります。
自動運転技術の中核となるのはコンピュータービジョンです。
コンピューター ビジョンは、世界とその内部の相互作用をリアルタイムにデジタルで表現したものです。
コンピューティング、センサー、機械学習、ソフトウェアのイノベーションのおかげで、飛躍的な進歩と進歩の恩恵を受けてきました。
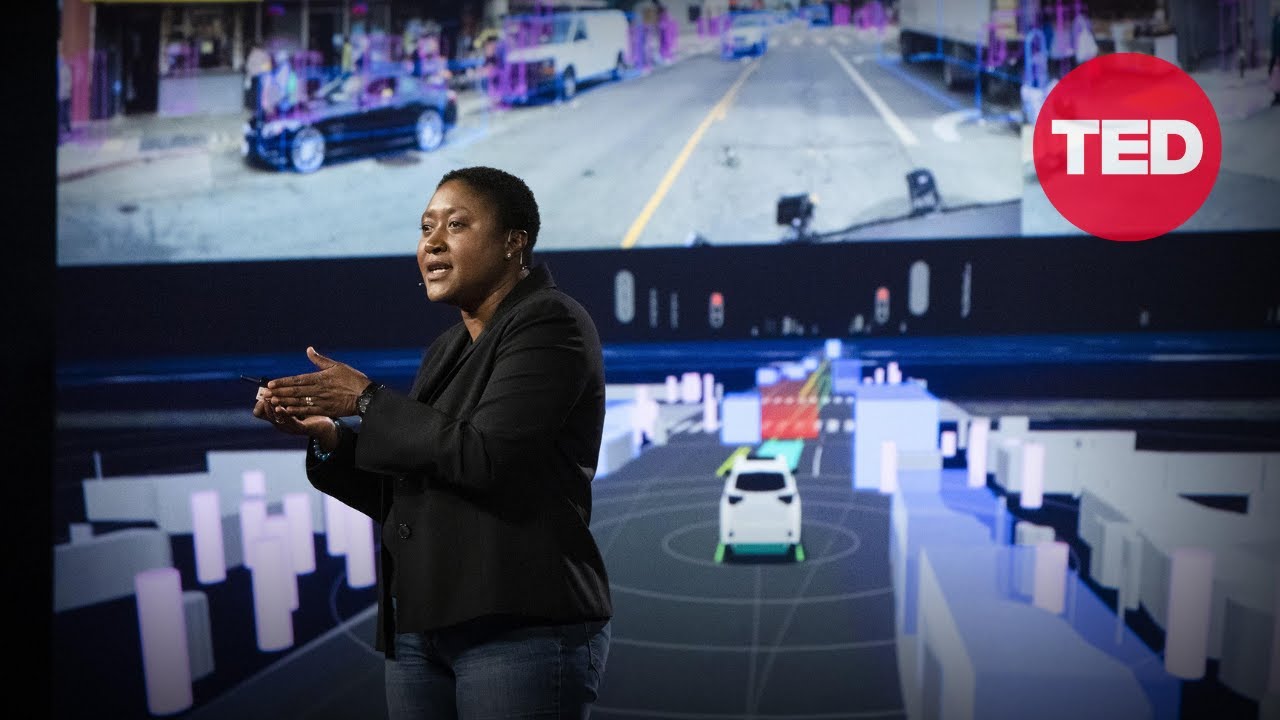
コンピュータ ビジョンの中核となるのはカメラ システムです。
カメラは基本的に、車、その位置とその動作、歩行者、その位置、動作、ジェスチャーなどのエージェントを確認するのに役立ちます。
さらに、多くの進歩もありました。
一例として、私たちの車両はスケルトンのフレームワークを表示して進行方向を示し、工事現場で建設作業員を相手にしているのか、それとも歩行者が注意をそらされている可能性があるのかなどの詳細情報も提供します。携帯電話を見ていますか?
しかし現実は、ここが興味深いところですが、カメラと私たちを支援するアルゴリズムは、環境を理解し解釈する人間の脳の能力にはまだ及ばないということです。
それができないのです。
本当に高解像度の画像処理を提供し、疲労や障害、飲酒などに影響されずに継続的に撮影できるにもかかわらず、結局のところ、できることはまだあります。見えないし、測定もできない。
したがって、自動運転やロボット軸をすぐに実現したい場合は、カメラを補完する必要があります。
いくつかの例を見てみましょう。
したがって、レーダーは進行方向を提供し、エージェントの動きを毎秒センチメートル以内で測定します。
LiDAR は、奥行き認識、長距離、そして最も重要な暗視機能を使用して、現実世界のオブジェクトや形状を提供します。
そして、これについてお話しさせてください。これは私個人にとって、そして私に似た人々にとって重要なことだからです。
さらに、長波赤外線もあり、動物や人間など、熱を発している物質を確認できます。
そして、これもまた、特に夜には非常に重要です。
これらのセンサーはそれぞれ単独でも非常に強力ですが、それらを組み合わせると魔法が起こります。
たとえば、この車両では、車両の上部 4 隅すべてに複数のセンサー モダリティがあり、基本的に冗長な方法で 360 度の視野を継続的に提供するため、何も見逃すことはありません。
これは、さまざまな出力がすべて融合されたものと同じであり、これを基本的に見て、私たちが何を見て、どのようにデータを処理し、学習し、運転を改善し続けることができるかを見て、それが私たちに教えてくれます。これが正しいアプローチであると私たちは確信しており、今回は実際にそうなりつつあります。
さて、ところで、これはまったく新しい概念ではありません。
人間は長い間、基本的に視覚システムを使用して支援してきました。
少し話を戻します。誰もが尋ねている質問があると思います。それは、今日街で起きているすべてのシナリオにどう対処するつもりですか?
私たちのほとんどはドライバーですが、世の中は複雑です。
実のところ、現実世界でのテストの境界に位置する、または現実の路上でテストするには危険すぎるエッジ シナリオが常に存在します。
それが真実です。
そしてそれは長い間真実であり続けるでしょう。
人間の能力はかなり過小評価されています。
そこで、私たちはシミュレーションを使用します。シミュレーションを使用すると、製造された環境で何百万ものシナリオを構築できるので、ソフトウェアがどのように反応するかを確認できます。
それがシミュレーション映像です。
私たちが世界を構築し、シナリオを作成していることがわかります。そして、何かを追加したり削除したりして、どのように反応するかを確認できます。
さらに、私たちにはいわゆる人間が関与しています。
これは今日の航空システムと非常に似ています。
車が立ち往生することは望ましくありません。
そして、まれに、どうすればいいのか分からないときもあります。
そこで、私たちはコントロールセンターに遠隔誘導オペレーターのチームを配置しており、車両が立ち往生することを知っている場合、または何をすべきかわからない場合、指示と助けを求め、遠隔でそれを受け取ります。そしてそれは進みます。
さて、先ほども触れたように、これらは実際には新しい概念ではありません。
視覚システムは、特に肉眼では見えないものに関して、長い間人間を支援してきました。
それで、顕微鏡ですよね?
私たちは長い間微生物と細胞を研究してきました。
望遠鏡。
私たちは長い間、数百万光年離れた銀河の研究と検出を行ってきました。
そしてこれらの両方が、たとえば、医療、農業、天体物理学などの産業を変革する原因となっています。
したがって、コンピューター ビジョンについて話すとき、それが始まったとき、実際には、人間が見ているものをカメラを使用して再現できるかどうかを確認する思考実験でした。
現在では、センサー、コンピューティング、AI、ソフトウェアの革新によって卒業し、人間が見て知覚できるものを超えようとしています。
私たちはこの分野で多くの進歩を遂げてきましたが、結局のところ、やるべきことはたくさんあります。自律型ロボタクシーでは、いつでも安全、正しく、信頼できるものであることが望まれますが、そのためには次のことが必要です。厳格なテストと最適化。
そして、それが起こり、その状態に達したとき、私たちは、墜落事故の 94 パーセントが人間によって引き起こされたことを、どうやって受け入れ、容認してきたのだろうかと疑問に思うでしょう。
つまり、コンピューター ビジョンによって、私たちは問題解決から問題予防に移行する機会を得られるのです。私は、次世代の科学者や技術者が、そう、シリコンバレーだけでなく、パリ、セネガル、西アフリカ、世界中の人々がコンピュータ ビジョンにさらされ、広く適用されるようになり、それによってあらゆる産業が変革され、私たちは異なる方法で世界を体験することになるでしょう。
コンピューター ビジョンが解決に役立つことがたくさんあるため、これは、私たちが来るべき次世代に負っているほとんどの贈り物であることに同意していただければ幸いです。
ありがとう。
ありがとう。


コメント